
Việc kiểm soát các đại dương sẽ được thực hiện bằng các phương tiện tự động không có người ở (AUV). Cuộc đấu tranh chính diễn ra giữa Hoa Kỳ và Trung Quốc là ở đáy biển, nơi hai quốc gia có tham vọng rất lớn nhằm thống trị những vùng nước lợi ích chi ến lược và khống chế lẫn nhau.
Một điều thú vị là, từ đầu thế kỷ 21, Bắc Kinh bí mật tuyệt đối tất cả các hoạt động nghiên cứu về tự động hóa và robot, trong đó có các robot hoạt động dưới biển và đại dương.
Theo khẳng định của nhiều chuyên gia nước ngoài trong lĩnh vực nghiên cứu dưới đáy đại dương, Trung Quốc đã cung cấp một nguồn kinh phí rất lớn để phát triển các robot dưới đại dương “Autonomous Underwater Vehicle” (AUV) tương đương với chương trình v ũ kh í h ạt nhâ n, nhưng không công bố bất cứ thông tin nào về những thành quả đạt được.
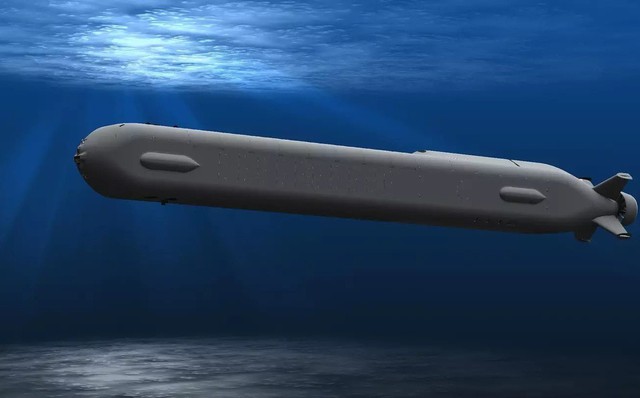
Tàu ngầm không người lái Orca do hãng Boeing chế tạo, thực hiện nhiệm vụ trinh sát chống ngầm, chống thủy lôi. Ảnh minh họa: The Drive.
Ngược lại, Mỹ thường xuyên cung cấp thông tin và quảng cáo những kết quả đạt được trong lĩnh vực này. Điều đó cho thấy được tổng quan về cuộc chạy đua vũ trang trong thế giới ngầm dưới nước đang được Lầu Năm Góc cùng các quốc gia khác thực hiện để có được lợi ích địa chính trị trên các đại dương rộng lớn.
Các phương tiện dưới nước không có người ở lái là công cụ chính và là mắt xích chính trong việc thực hiện khái niệm chiế n tra nh tập trung vào mạng lưới trên toàn bộ khu vực đại dương – trên bề mặt và chiều sâu của nó. Net-centrism, ở dạng đơn giản hóa, là một trường thông tin duy nhất trong đó tất cả các hệ thống chi ến đấ u được nhúng vào. Trong trường hợp này là hải quân.
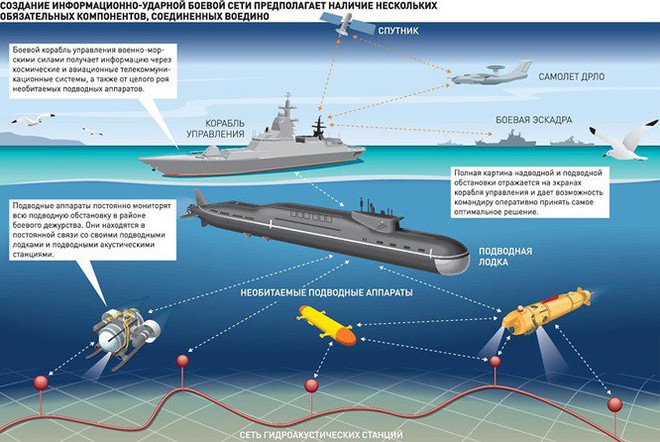
Mạng tác ch iến chi ến dịch – chi ến thuật sử dụng AUV ở độ sâu lớn, liên kết với hệ thống mạng lưới thủy âm và hệ thống các chi ến hạm nổi và tàu ngầm. Ảnh: Russian Gazeta.
Theo học thuyết quân sự đại dương của Lầu Năm Góc từ những nguồn thông tin mở cho thấy, một trong những đặc điểm chung giữa Mỹ và Trung Quốc là:
Các AUV nhiều chủng loại khác nhau sẽ có sứ mệnh thường xuyên hoạt động dưới ngầm, thu thập các thông tin tình báo, trinh sát trong khu vực được cho là có khả năng diễn ra các cuộc xung đột hải quân như Biển Đông, Biển Hoa Đông, eo biển Đài Loan và biển Nhật Bản, Địa Trung Hải và vùng Vịnh Ba Tư…
Những thông tin tình báo thường xuyên, liên tục này sẽ được chuyển đến các trung tâm chỉ huy và tham mưu ch iến trường trên chiế n h ạm nổi, những thông tin quan trọng liên quan đến tàu ngầm và chống ngầm được chuyển trực tiếp đến các tàu ngầm.
Như vậy, các AUV và các tàu ngầm, các ch iến hạm nổi trở thành trung tâm cơ động thu thập thông tin, truyền tải thông tin và là trạm chuyển tiếp thông tin trên mặt nước và dưới mặt nước.
Các phương tiện dưới nước không người lái ( AUV ) trở thành công cụ và mắt xích chính trong việc đưa vào thực tế hóa khái niệm ch iến tra nh tập trung dạng mạng trên toàn bộ đại dương – trên mặt nước và dưới. Thuật ngữ Net-centrism, trong khái niệm đơn giản hóa, là một trường thông tin duy nhất trong đó tích hợp tất cả các phương tiện chi ến đấ u, bao gồm Hải quân và không quân Hải quân.
Nghiên cứu các AUV, cả Trung Quốc và Mỹ đều cho rằng, các phương tiện lặn ngầm không người lái có thể mang theo v ũ k hí – ngư lôi hoặc thủy lôi và có thể cho phép các phương tiện này phục kích dưới nước với thời gian rất dài.
Ngoài ra, Mỹ hiện đang chế tạo các AUV hoạt động theo phương án bầy đàn, điển hình là dự án Manta Ray. Đó thật sự là một tàu ngầm không người lái, được trang bị ngư lôi tốc độ cao giống phương án ngư lôi Shkval của Liên Xô.
Những tàu ngầm nhỏ này được trang bị các cảm biến, sonar hiện đại khác nhau, được điều khiển bởi trí tuệ nhân tạo. Trong điều kiện ch iến đ ấu, các tàu ngầm mini này tự động tìm kiếm các tàu ngầm đối phương, thủy lôi và các phương tiện tác chi ến ngầm khác, tập trung hỏa lực tiêu diệt tùy theo các loại mục tiêu.
Đến thời điểm này, hai cường quốc kinh tế – quân sự thế giới vẫn tiếp tục đẩy mạnh các hoạt động nghiên cứu.
Một trong những vấn đề then chốt đặt ra chưa được giải quyết triệt để, đó là nguồn năng lượng cho các tàu ngầm mini không người lái và các robot AUV hoạt động ngầm dưới đáy đại dương trong thời gian dài được tính bằng nhiều tháng. Do đó, các robot, tàu ngầm không người lái thử nghiệm chỉ có thể hoạt động ở độ sâu tới 500m.
Cho đến nay, chỉ có ngư lôi – tàu ngầm Poseidon của Nga được tuyên bố là sẽ sử dụng lò phản ứng h ạt nh ân thu nhỏ, cho phép nó có thể cơ động nhiều thời gian ở độ sâu dưới 500m.
Như vậy, hầu như các thiết kế về chế tạo những phương tiện không người lái, được Nga bắt đầu nghiên cứu từ năm 1996 đã bắt đầu sẵn sàng tác ch iến.
Điểm duy nhất khiến tất cả các thiết kế này không được đưa vào thực tế là nguồn năng lượng không đủ lớn để thực thi nhiệm vụ. Do đó, trong tương lai gần, chắc chắn cả Mỹ và Trung Quốc đều sẽ nỗ lực phát triển các trạm nguồn hạ t nh ân kích thước nhỏ, cho phép lắp đặt lên các AUV ngầm để có thể hoạt động không giới hạn dưới nước.